Arm-2D provides several standard ways to add support for the hardware acceleration of your target platform. Those methods address the typical 2D accelerations that are available in the ecosystem. Arm-2D categorizes them into several topics:
- Accelerations that are Tightly Coupled with Software Algorithm. This is also known as Synchronouse Acceleration.
- Accelerations Asynchronousely via dedicated Processing Element (PE).
- 2D-Capable-DMA, for example: DMAC-350, DMA2D
- 2D GPUs
- Processors are dedicated for running 2D processing tasks
- Acceleration via Arm Custom Instruction (ACI)
Depending on the capability of the target platform, the acceleration methods might exist simultaneously, for example, a dual-core Cortex-M55 system with Helium and ACI extensions, using DMAC-350 to accelerate some 2D operations. In other words, the aforementioned acceleration methods are not mutually exclusive. You can apply and enable them to arm-2d if available.
NOTE:
- When Helium is available, and one enables the Helium support during the compilation, Arm-2D detects the Helium and turns on the Helium acceleration automatically.
- This document is for system/application engineers who design drivers to add various accelerations to Arm-2D for a target hardware platform.
1 Software Tightly Coupled (Synchronouse) Acceleration
1.1 Acceleration via Arm-2D Intrinsics
Arm-2D uses some Arm-2D specific Intrinsics in the default low-level C implementations. These intrinsics are defined as macros in the private header file __arm_2d_impl.h:
#ifndef __ARM_2D_PIXEL_BLENDING_INIT
# define __ARM_2D_PIXEL_BLENDING_INIT
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_GRAY8
# define __ARM_2D_PIXEL_BLENDING_GRAY8(__SRC_ADDR, __DES_ADDR, __TRANS) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = 256 - (__TRANS); \
const uint8_t *ARM_2D_SAFE_NAME(pchSrc) = (uint8_t *)(__SRC_ADDR); \
uint8_t *ARM_2D_SAFE_NAME(pchDes) = (uint8_t *)(__DES_ADDR); \
\
*ARM_2D_SAFE_NAME(pchDes) \
= ((uint16_t)( ( (uint16_t)(*ARM_2D_SAFE_NAME(pchSrc)) \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ((uint16_t)(*ARM_2D_SAFE_NAME(pchDes)) * (__TRANS)) \
) >> 8); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_GRAY8
# define __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_GRAY8( __SRC_ADDR, \
__DES_ADDR, \
__TRANS) \
do { \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tSrcPix); \
__arm_2d_ccca8888_unpack(*(__SRC_ADDR), &ARM_2D_SAFE_NAME(tSrcPix)); \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = ARM_2D_SAFE_NAME(tSrcPix).BGRA[3]; \
ARM_2D_SAFE_NAME(hwOPA) += (ARM_2D_SAFE_NAME(hwOPA) == 255); \
ARM_2D_SAFE_NAME(hwOPA) = ARM_2D_SAFE_NAME(hwOPA) * ((__TRANS) == 0) \
+ ( (ARM_2D_SAFE_NAME(hwOPA) * (256 - (__TRANS)) >> 8) \
* ((__TRANS) != 0)); \
uint16_t ARM_2D_SAFE_NAME(hwTRANS) = 256 - ARM_2D_SAFE_NAME(hwOPA); \
\
uint8_t *ARM_2D_SAFE_NAME(pchTargetPixel) = (__DES_ADDR); \
uint8_t ARM_2D_SAFE_NAME(chSrcPixel) \
= __arm_2d_gray8_pack(&ARM_2D_SAFE_NAME(tSrcPix)); \
\
*ARM_2D_SAFE_NAME(pchTargetPixel) = \
((uint16_t) ( ( (uint16_t)ARM_2D_SAFE_NAME(chSrcPixel) \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ( (uint16_t)(*ARM_2D_SAFE_NAME(pchTargetPixel)) \
* (ARM_2D_SAFE_NAME(hwTRANS))) \
) >> 8); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_RGB565
# define __ARM_2D_PIXEL_BLENDING_RGB565(__SRC_ADDR, __DES_ADDR, __TRANS) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = 256 - (__TRANS); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tSrcPix); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tTargetPix); \
uint16_t *ARM_2D_SAFE_NAME(phwTargetPixel) = (__DES_ADDR); \
__arm_2d_rgb565_unpack(*(__SRC_ADDR), &ARM_2D_SAFE_NAME(tSrcPix)); \
__arm_2d_rgb565_unpack(*ARM_2D_SAFE_NAME(phwTargetPixel), \
&ARM_2D_SAFE_NAME(tTargetPix)); \
\
for (int ARM_2D_SAFE_NAME(i) = 0; \
ARM_2D_SAFE_NAME(i) < 3; \
ARM_2D_SAFE_NAME(i)++) { \
uint16_t ARM_2D_SAFE_NAME(hwTemp) = \
(uint16_t)( ARM_2D_SAFE_NAME(tSrcPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ( ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* (__TRANS)); \
ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
= (uint16_t) (ARM_2D_SAFE_NAME(hwTemp) >> 8); \
} \
\
\
*ARM_2D_SAFE_NAME(phwTargetPixel) \
= __arm_2d_rgb565_pack(&ARM_2D_SAFE_NAME(tTargetPix)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_RGB565
# define __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_RGB565( __SRC_ADDR, \
__DES_ADDR, \
__TRANS) \
do { \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tSrcPix); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tTargetPix); \
__arm_2d_ccca8888_unpack(*(__SRC_ADDR), &ARM_2D_SAFE_NAME(tSrcPix)); \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = ARM_2D_SAFE_NAME(tSrcPix).BGRA[3]; \
ARM_2D_SAFE_NAME(hwOPA) += (ARM_2D_SAFE_NAME(hwOPA) == 255); \
ARM_2D_SAFE_NAME(hwOPA) = ARM_2D_SAFE_NAME(hwOPA) * ((__TRANS) == 0) \
+ ( ( ARM_2D_SAFE_NAME(hwOPA) \
* (256 - (__TRANS)) >> 8) \
* ((__TRANS) != 0)); \
uint16_t ARM_2D_SAFE_NAME(hwTRANS) = 256 - ARM_2D_SAFE_NAME(hwOPA); \
\
uint16_t *ARM_2D_SAFE_NAME(phwTargetPixel) = (__DES_ADDR); \
__arm_2d_rgb565_unpack(*ARM_2D_SAFE_NAME(phwTargetPixel), \
&ARM_2D_SAFE_NAME(tTargetPix)); \
\
for ( int ARM_2D_SAFE_NAME(i) = 0; \
ARM_2D_SAFE_NAME(i) < 3; \
ARM_2D_SAFE_NAME(i)++) { \
uint16_t ARM_2D_SAFE_NAME(hwTemp) = \
( ARM_2D_SAFE_NAME(tSrcPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ( ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* (ARM_2D_SAFE_NAME(hwTRANS))); \
ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] = \
(uint16_t) (ARM_2D_SAFE_NAME(hwTemp) >> 8); \
} \
\
\
*ARM_2D_SAFE_NAME(phwTargetPixel) \
= __arm_2d_rgb565_pack(&ARM_2D_SAFE_NAME(tTargetPix)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_CCCN888
# define __ARM_2D_PIXEL_BLENDING_CCCN888(__SRC_ADDR, __DES_ADDR, __TRANS) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = 256 - (__TRANS); \
\
uint_fast8_t ARM_2D_SAFE_NAME(n) = sizeof(uint32_t) - 1; \
const uint8_t *ARM_2D_SAFE_NAME(pchSrc) = (uint8_t *)(__SRC_ADDR); \
uint8_t *ARM_2D_SAFE_NAME(pchDes) = (uint8_t *)(__DES_ADDR); \
\
do { \
*ARM_2D_SAFE_NAME(pchDes) = \
( ( (uint_fast16_t)(*ARM_2D_SAFE_NAME(pchSrc)++) \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ((uint_fast16_t)(*ARM_2D_SAFE_NAME(pchDes)) * (__TRANS)) \
) >> 8; \
ARM_2D_SAFE_NAME(pchDes)++; \
} while(--ARM_2D_SAFE_NAME(n)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_CCCN888
# define __ARM_2D_PIXEL_BLENDING_CCCA8888_TO_CCCN888( __SRC_ADDR, \
__DES_ADDR, \
__TRANS) \
do { \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tSrcPix); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tTargetPix); \
__arm_2d_ccca8888_unpack(*(__SRC_ADDR), &ARM_2D_SAFE_NAME(tSrcPix)); \
uint16_t ARM_2D_SAFE_NAME(hwOPA) = ARM_2D_SAFE_NAME(tSrcPix).BGRA[3]; \
ARM_2D_SAFE_NAME(hwOPA) += (ARM_2D_SAFE_NAME(hwOPA) == 255); \
ARM_2D_SAFE_NAME(hwOPA) = \
ARM_2D_SAFE_NAME(hwOPA) * ((__TRANS) == 0) \
+ ( (ARM_2D_SAFE_NAME(hwOPA) * (256 - (__TRANS)) >> 8) \
* ((__TRANS) != 0)); \
uint16_t ARM_2D_SAFE_NAME(hwTRANS) = 256 - ARM_2D_SAFE_NAME(hwOPA); \
\
uint32_t *ARM_2D_SAFE_NAME(pwTargetPixel) = (__DES_ADDR); \
__arm_2d_ccca8888_unpack( *ARM_2D_SAFE_NAME(pwTargetPixel), \
&ARM_2D_SAFE_NAME(tTargetPix)); \
\
for ( int ARM_2D_SAFE_NAME(i) = 0; \
ARM_2D_SAFE_NAME(i) < 3; \
ARM_2D_SAFE_NAME(i)++) { \
uint16_t ARM_2D_SAFE_NAME(hwTemp) = \
( ARM_2D_SAFE_NAME(tSrcPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* ARM_2D_SAFE_NAME(hwOPA)) \
+ ( ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* ARM_2D_SAFE_NAME(hwTRANS)); \
ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
= (uint16_t) (ARM_2D_SAFE_NAME(hwTemp) >> 8); \
} \
\
\
*ARM_2D_SAFE_NAME(pwTargetPixel) \
= __arm_2d_ccca8888_pack(&ARM_2D_SAFE_NAME(tTargetPix)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_OPA_GRAY8
# define __ARM_2D_PIXEL_BLENDING_OPA_GRAY8(__SRC_ADDR, __DES_ADDR, __OPA) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwTrans) = 256 - (__OPA); \
const uint8_t *ARM_2D_SAFE_NAME(pchSrc) = (uint8_t *)(__SRC_ADDR); \
uint8_t *ARM_2D_SAFE_NAME(pchDes) = (uint8_t *)(__DES_ADDR); \
\
*ARM_2D_SAFE_NAME(pchDes) = \
((uint16_t) ( ((uint16_t)(*ARM_2D_SAFE_NAME(pchSrc)++) * (__OPA)) \
+ ( (uint16_t)(*ARM_2D_SAFE_NAME(pchDes)) \
* ARM_2D_SAFE_NAME(hwTrans)) \
) >> 8); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_OPA_RGB565
# define __ARM_2D_PIXEL_BLENDING_OPA_RGB565(__SRC_ADDR, __DES_ADDR, __OPA) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwTrans) = 256 - (__OPA); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tSrcPix); \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tTargetPix); \
uint16_t *ARM_2D_SAFE_NAME(phwTargetPixel) = (__DES_ADDR); \
__arm_2d_rgb565_unpack(*(__SRC_ADDR), &ARM_2D_SAFE_NAME(tSrcPix)); \
__arm_2d_rgb565_unpack( *ARM_2D_SAFE_NAME(phwTargetPixel), \
&ARM_2D_SAFE_NAME(tTargetPix)); \
\
for ( int ARM_2D_SAFE_NAME(i) = 0; \
ARM_2D_SAFE_NAME(i) < 3; \
ARM_2D_SAFE_NAME(i)++) { \
uint16_t ARM_2D_SAFE_NAME(hwTemp) = \
( ARM_2D_SAFE_NAME(tSrcPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* (__OPA)) \
+ ( ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
* ARM_2D_SAFE_NAME(hwTrans)); \
ARM_2D_SAFE_NAME(tTargetPix).BGRA[ARM_2D_SAFE_NAME(i)] \
= (uint16_t) (ARM_2D_SAFE_NAME(hwTemp) >> 8); \
} \
\
\
*ARM_2D_SAFE_NAME(phwTargetPixel) \
= __arm_2d_rgb565_pack(&ARM_2D_SAFE_NAME(tTargetPix)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_BLENDING_OPA_CCCN888
# define __ARM_2D_PIXEL_BLENDING_OPA_CCCN888(__SRC_ADDR, __DES_ADDR, __OPA) \
do { \
uint16_t ARM_2D_SAFE_NAME(hwTrans) = 256 - (__OPA); \
\
uint_fast8_t ARM_2D_SAFE_NAME(n) = sizeof(uint32_t) - 1; \
const uint8_t *ARM_2D_SAFE_NAME(pchSrc) = (uint8_t *)(__SRC_ADDR); \
uint8_t *ARM_2D_SAFE_NAME(pchDes) = (uint8_t *)(__DES_ADDR); \
\
do { \
*ARM_2D_SAFE_NAME(pchDes) = \
( ((uint_fast16_t)(*ARM_2D_SAFE_NAME(pchSrc)++) * (__OPA)) \
+ ( (uint_fast16_t)(*ARM_2D_SAFE_NAME(pchDes)) \
* ARM_2D_SAFE_NAME(hwTrans)) \
) >> 8; \
ARM_2D_SAFE_NAME(pchDes)++; \
} while(--ARM_2D_SAFE_NAME(n)); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_AVERAGE_RGB565
# define __ARM_2D_PIXEL_AVERAGE_RGB565(__PIXEL_IN, __ALPHA) \
do { \
__arm_2d_color_fast_rgb_t ARM_2D_SAFE_NAME(tTempColour); \
__arm_2d_rgb565_unpack((__PIXEL_IN), &ARM_2D_SAFE_NAME(tTempColour)); \
tPixel.R += ARM_2D_SAFE_NAME(tTempColour).R * (__ALPHA); \
tPixel.G += ARM_2D_SAFE_NAME(tTempColour).G * (__ALPHA); \
tPixel.B += ARM_2D_SAFE_NAME(tTempColour).B * (__ALPHA); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_AVERAGE_CCCN888
# define __ARM_2D_PIXEL_AVERAGE_CCCN888(__PIXEL_IN, __ALPHA) \
do { \
arm_2d_color_rgb888_t ARM_2D_SAFE_NAME(tTempColour) \
= {.tValue = (__PIXEL_IN)}; \
tPixel.R += ARM_2D_SAFE_NAME(tTempColour).u8R * (__ALPHA); \
tPixel.G += ARM_2D_SAFE_NAME(tTempColour).u8G * (__ALPHA); \
tPixel.B += ARM_2D_SAFE_NAME(tTempColour).u8B * (__ALPHA); \
} while(0)
#endif
#ifndef __ARM_2D_PIXEL_AVERAGE_GRAY8
# define __ARM_2D_PIXEL_AVERAGE_GRAY8(__PIXEL_IN, __ALPHA) \
do { \
tPixel += (uint16_t)(__PIXEL_IN) * (uint16_t)(__ALPHA); \
} while(0)
#endif
NOTE: Arm-2D will call __ARM_2D_PIXEL_BLENDING_INIT every time before running the low-level implementation.
As shown above, you can override the default definition and implement with your own acceleration. Depends on the toolchain and the way of compilation, different ways of overriding the Arm-2D intrinsics are available:
- * Creating a header file called
arm_2d_user_sync_acc.h, adding your definition in the header file and defining the macro __ARM_2D_HAS_TIGHTLY_COUPLED_ACC__ to 1 (in arm_2d_cfg.h or -D option). (This is the recommended method.)
- Using
-D in command line.
- Providing your own definition in a header file and pre-including it in the compilation (for example, via
-include option in GCC, LLVM and Arm Compiler 6).
1.2 Overriding the Default Low-Level Implementations
Arm-2D provides the default C implementations for a set of 2D operations. Although these functions are seperated in different c source files, the prototypes are list in a private header file called __arm_2d_direct.h.
You can override the default C implementation by using the keyword __OVERRIDE_WEAK, for example:
#define __ARM_2D_IMPL__
#include "__arm_2d_impl.h"
void __arm_2d_sync_acc_init(void)
{
}
void __arm_2d_impl_rgb565_src_msk_copy(uint16_t * __restrict pSourceBase,
int16_t iSourceStride,
uint8_t * __restrict ptSourceMaskBase,
int16_t iSourceMaskStride,
__restrict ptSourceMaskSize,
uint16_t * __restrict pTargetBase,
int16_t iTargetStride,
{
}
This example code overrides the low-level implementation of tile-copy-with-src-mask-only for rgb565.
1.3 Insert An User Defined Header File
If you defined the macro __ARM_2D_HAS_TIGHTLY_COUPLED_ACC__ to 1, an user defined header file arm_2d_user_sync_acc.h will be included in compilation, as shown below:
#if defined(__ARM_2D_HAS_TIGHTLY_COUPLED_ACC__) && __ARM_2D_HAS_TIGHTLY_COUPLED_ACC__
# include "arm_2d_user_sync_acc.h"
#endif
You can use this header file to
- Override Arm-2D intrinsics and
- Provide related information if required, such as function prototypes, variables definitions, user defined types, macros etc.
NOTE:
- The macro
__ARM_2D_HAS_TIGHTLY_COUPLED_ACC__ does NOT affect the overriding of Arm-2D intrinsics.
- It is NOT necessary but recommended to use
arm_2d_user_sync_acc.h to override the Arm-2D intrinsics as long as you have other viable solutions (for example, use -D command line option in GCC, LLVM and Arm Compiler 6 )
- It is NOT necessary but recommanded to use macro
__ARM_2D_HAS_TIGHTLY_COUPLED_ACC__ to include the header file arm_2d_user_sync_acc.h as long as you have other viable solutions (for example, use -include command line option in GCC, LLVM and Arm Compiler 6 ).
After setting the macro __ARM_2D_HAS_TIGHTLY_COUPLED_ACC__ to 1, arm_2d.c will call the __arm_2d_sync_acc_init() that you MUST implement in your own c source file. You can initialize the acceleration hardware logic here. If there is nothing to initialize, please place an empty function body in your c source code.
...
# define __arm_2d_sync_acc_init()
#endif
...
extern
void __arm_2d_sync_acc_init(void);
#endif
...
{
__arm_2d_init();
...
__arm_2d_sync_acc_init();
...
}
2 Asynchronouse Acceleration
2.1 Pixel Pipeline Overview
Architectually, Arm-2D is designed as a Pixel-Pipeline plus a set of OPCODE, as shown in Figure 2-1.
Figure 2-1 Arm-2D Pixel-Pipeline
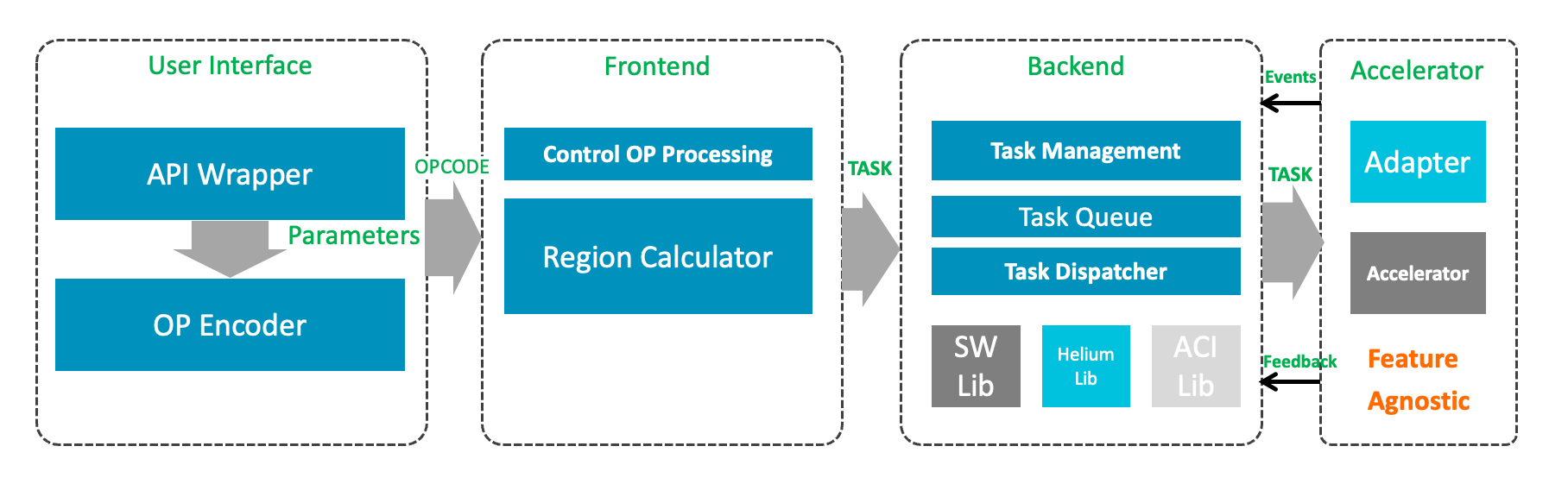
PixelPipeline
Here, OPCODE is the descriptor of 2D operations. It contains both the arguments from the caller and the references to the actual algorithms for the specific 2D operation. The User Interface part provides APIs that generate and initialize OPCODE. The Frontend performs some common pre-processing for each OPCODE and generates TASK**s for the **Backend.
TASK is the descriptor of low-level tasks that can be handled by software algorithms and hardware accelerators. The key feature of the Backend is a Fall-back scheme, that the Dispatcher in the Backend will always issue tasks to the HW adaptor (a driver for a corresponding accelerator) and falls back to the software algorithm for tasks refused by the HW adaptor.
Feature Agnostic
Arm-2D does not propose a standard for what functionality a hardware accelerator should provide, nor does it set requirements for the characteristics of a hardware accelerator. This is intentional. In order to get the best compatibility and interface flexibility, Arm-2D splits 2D processing into simple small tasks, validates parameters passed to the hardware (e.g. ensuring that the coordinate values are always non-negative, and memory addresses are valid), passes all the task information to the HW adapter, and let the HW adaptor to decide whether the corresponding task can be processed or not. This is the meanning of the Feature Agnostic.
2.2 OPCODE based Acceleration Entry
Each OPCODE refers to a dedicated Low-Level-IO that has two function pointers:
typedef arm_fsm_rt_t __arm_2d_io_func_t(__arm_2d_sub_task_t *ptTask);
__arm_2d_io_func_t *SW;
__arm_2d_io_func_t *HW;
- Here
SW points to a software implementation that won't return until either the 2D operation is complete or some error happens.
- Here
HW points to the hardware adaptor (a.k.a driver) of a hardware accelerator that can work asynchronously with the caller of the Arm-2D APIs. Based on the arguments passed to the HW, the capability and the status of the 2D accelerator, the hardware adaptor might:
- return
ARM_2D_ERR_NOT_SUPPORT if the hardware isn't capable to do what is requested.
- return
arm_fsm_rt_cpl if the task is done immediately (and no need to wait).
- return
arm_fsm_rt_async if the task is done asynchronously and the driver will call function __arm_2d_notify_sub_task_cpl() to report the result.
Arm-2D provides the default C implementation (and the Helium version when it is available) for each OPCODE.
__WEAK
def_low_lv_io(__ARM_2D_IO_COPY_C8BIT, __arm_2d_c8bit_sw_tile_copy);
__WEAK
def_low_lv_io(__ARM_2D_IO_COPY_RGB16, __arm_2d_rgb16_sw_tile_copy);
__WEAK
def_low_lv_io(__ARM_2D_IO_COPY_RGB32, __arm_2d_rgb32_sw_tile_copy);
...
__WEAK
def_low_lv_io(__ARM_2D_IO_FILL_ONLY_C8BIT, __arm_2d_c8bit_sw_tile_fill_only);
__WEAK
def_low_lv_io(__ARM_2D_IO_FILL_ONLY_RGB16, __arm_2d_rgb16_sw_tile_fill_only);
__WEAK
def_low_lv_io(__ARM_2D_IO_FILL_ONLY_RGB32, __arm_2d_rgb32_sw_tile_fill_only);
...
Here __arm_2d_<colour>_sw_<operation name> are the default software implementations for corresponding Low-Level-IO. The keyword __WEAK indicates that the target IOs can be overridden with user-defined ones. For example, if you want to accelerate copy-with-opacity for RGB565 using your own hardware accelerator, please do the following steps:
In one of your C source file, override the target Low-Level-IO __ARM_2D_IO_COPY_WITH_OPACITY_ONLY_RGB565
#define __ARM_2D_IMPL__
#include "arm_2d.h"
#include "__arm_2d_impl.h"
...
__OVERRIDE_WEAK
def_low_lv_io( __ARM_2D_IO_COPY_WITH_OPACITY_ONLY_RGB565,
__arm_2d_rgb565_sw_tile_copy_with_opacity_only,
__arm_2d_rgb565_my_hw_tile_copy_with_opacity_only);
- Copy the function body of
__arm_2d_rgb565_sw_tile_copy_with_opacity_only() to your source file, rename it as __arm_2d_rgb565_my_hw_tile_copy_with_opacity_only() and use it as a template of the hardware adaptor.
- Update
__arm_2d_rgb565_my_hw_tile_copy_with_opacity_only for the hardware accelerator.
- Based on the arguments passed to the function and the capability of your 2D accelerator, please:
- return
ARM_2D_ERR_NOT_SUPPORT if the hardware isn't capable to do what is requested.
- return
arm_fsm_rt_cpl if the task is done immediately and no need to wait.
- return
arm_fsm_rt_async if the task is done asynchronously and later report to arm-2d by calling function __arm_2d_notify_sub_task_cpl().
NOTE: As the Arm-2D pipeline will keep issuing tasks to your hardware adaptor, please quickly check whether the hardware is capable of doing the task:
- If the hardware adaptor decides to keep it, it can add the task (an
__arm_2d_sub_task_t object) to a waiting list in First-In-First-Out manner, and handle them later.
- If the hardware adaptor is busy and don't want to maintain a waiting list, it can return
ARM_2D_ERR_NOT_SUPPORT and the task falls-back to the SW implementation.
2.3 Insert An User Defined Header File
If you defined the macro __ARM_2D_HAS_HW_ACC__ to 1, an user defined header file arm_2d_user_async_acc.h will be included in compilation, as shown below:
#if defined(__ARM_2D_HAS_HW_ACC__) && __ARM_2D_HAS_HW_ACC__
# include "arm_2d_user_async_acc.h"
#endif
You can use this header file to
- Provide related information if required, such as function prototypes, variables definitions, user defined types, macros etc.
NOTE:
- The macro
__ARM_2D_HAS_HW_ACC__ does NOT affect the overriding of Arm-2D intrinsics or overriding the default OPCODEs.
- It is NOT necessary but recommended to use
arm_2d_user_async_acc.h to override the Arm-2D intrinsics and the default OPCODEs as long as you have other viable solutions (for example, use -D command line option in GCC, LLVM and Arm Compiler 6 )
- It is NOT necessary but recommanded to use macro
__ARM_2D_HAS_HW_ACC__ to include the header file arm_2d_user_async_acc.h as long as you have other viable solutions (for example, use -include command line option in GCC, LLVM and Arm Compiler 6 ).
After setting the macro __ARM_2D_HAS_HW_ACC__ to 1, arm_2d.c will call the __arm_2d_async_acc_init() that you MUST implement in your own c source file. You can initialize the acceleration hardware logic here. If there is nothing to initialize, please place an empty function body in your c source code.
...
# define __arm_2d_async_acc_init()
#endif
...
extern
void __arm_2d_async_acc_init(void);
#endif
...
{
__arm_2d_init();
...
__arm_2d_async_acc_init();
...
}
2.4 Software Design Considerations for End Users
2.4.1 When and How to Enable Asynchronouse Mode
Arm-2D APIs can be used in both Synchronous mode and Asynchronous mode. In fact, The Arm-2D library is designed for working asynchronously, and wrappers are added to support synchronous mode.
Synchronous Mode
The Synchronous mode is also known as the classic mode, in which a function call won't return until the task is finished or an error occurred.
Asynchronous Mode
The Asynchronous mode is good for the event-driven design paradigm, and it is suitable for most of the RTOS based applications and applications that are written in Protothread and/or FSM in the bare-metal system.
Please only enable Asynchronouse mode if and only if:
- The runtime supports multi-tasks (e.g. RTOS, protoThread and FSM)
- The device provides Accelerator(s) that works Asynchronousely with CPU (e.g. a 2D-GPU, a 2D-capable DMA or a dedicated processor)
- Hardware Adaptors are implemented for the Accelerator using the method described in Section 2.
You can enable the Asynchronouse mode by set the macro __ARM_2D_HAS_ASYNC__ to 1, the default value is 0. You can modify the macro value in arm_2d_cfg.h or define the macro __ARM_2D_HAS_ASYNC__ directly in your project, which will override the macro value defined in arm_2d_cfg.h:
#ifndef __ARM_2D_USER_CFG_H__
#define __ARM_2D_USER_CFG_H__
#include "RTE_Components.h"
...
# define __ARM_2D_HAS_ASYNC__ 0
#endif
...
#endif
2.4.2 How to Manage Dependencies Among 2D Operations
2.4.3 Acceleration Methods Preference
3 Acceleration via Arm Custom Instruction (ACI)
3.1 Helium-based ACI and Non-Helium-based ACI
A lot of Arm Cortex-M processors support Arm Custom Instruction. When Helium extension is available, chip designers can implement the so-called Helium-based ACI which can use 128bit wide vectors and Helium registers.
3.2 Disable the default Helium Implementation
In the Library/Include/template folder, there is a template file for the arm_2d_user_aci.h, please follow the guidance in the DISABLE DEFAULT HELIUM IMPLEMENTATION section to disable the default Helium implementation of the low level functions.
#if !defined(__ARM_2D_USER_ACI_H__) && __ARM_2D_HAS_ACI__
#define __ARM_2D_USER_ACI_H__
...
#if defined(__ARM_2D_IMPLEMENT_HELIUM__) && __ARM_2D_IMPLEMENT_HELIUM__
#endif
#endif
For example, suppose you want to accelerate __arm_2d_impl_rgb565_src_msk_copy and replace the Helium version with your own ACI accelerated one, then please do the following steps:
- Create a C source file for your own ACI accelerated low level function(s):
#define __ARM_2D_IMPL__
#include "__arm_2d_impl.h"
...
void __arm_2d_aci_init(void)
{
}
...
__OVERRIDE_WEAK
void __arm_2d_impl_rgb565_src_msk_copy(uint16_t * __restrict pSourceBase,
int16_t iSourceStride,
uint8_t * __restrict ptSourceMaskBase,
int16_t iSourceMaskStride,
__restrict ptSourceMaskSize,
uint16_t * __restrict pTargetBase,
int16_t iTargetStride,
{
}
- Copy the
arm_2d_user_aci.h from the Library/Include/template to your own directory and add the following content:
#if !defined(__ARM_2D_USER_ACI_H__) && __ARM_2D_HAS_ACI__
#define __ARM_2D_USER_ACI_H__
...
#if defined(__ARM_2D_IMPLEMENT_HELIUM__) && __ARM_2D_IMPLEMENT_HELIUM__
#define __arm_2d_impl_rgb565_src_msk_copy __arm_2d_impl_rgb565_src_msk_copy_origin
#endif
...
#endif
- Enable the ACI support in compilation (for example, adding option
-mcpu=cortex-m55+cdecp0 in the command line), after that the macro __ARM_2D_HAS_ACI will be set to 1 by arm-2d library automatically.
3.3 Insert An User Defined Header File
If you defined the macro __ARM_2D_HAS_ACI__ to 1, an user defined header file arm_2d_user_aci.h will be included in compilation, as shown below:
#if defined(__ARM_2D_HAS_ACI__) && __ARM_2D_HAS_ACI__
# include "arm_2d_user_aci.h"
#endif
You can use this header file to
- Override Arm-2D intrinsics,
- Disable the specfied helium implementation, and
- Provide related information if required, such as function prototypes, variables definitions, user defined types, macros etc.
After setting the macro __ARM_2D_HAS_ACI__ to 1, arm_2d.c will call the __arm_2d_aci_init() that you MUST implement in your own c source file. You can initialize the ACI logic if required. If there is nothing to initialize, please place an empty function body in your c source code.
...
# define __arm_2d_aci_init()
#endif
...
extern
void __arm_2d_aci_init(void);
#endif
...
{
__arm_2d_init();
...
__arm_2d_aci_init();
...
}

