|
CMSIS-Driver
Version 2.8.0
Peripheral Interface for Middleware and Application Code
|
|
CMSIS-Driver
Version 2.8.0
Peripheral Interface for Middleware and Application Code
|
The Software Pack named ARM::CMSIS-Driver_Validation contains the following:
The CMSIS-Driver Validation Suite performs the following tests:
The following CMSIS-Drivers can be tested with the current release:
The Driver Validation output can be printed to a console or saved in an XML file, via standard output (usually ITM).
CMSIS-Driver USART Test Report Dec 6 2019 11:44:30
TEST 01: USART_GetCapabilities PASSED
TEST 02: USART_Initialization PASSED
TEST 03: USART_PowerControl
DV_USART.c (301): [WARNING] Low power is not supported
PASSED
TEST 04: USART_Config_PolarityPhase PASSED
TEST 05: USART_Config_DataBits
DV_USART.c (387): [WARNING] Data Bits = 9 are not supported
PASSED
TEST 06: USART_Config_StopBits
DV_USART.c (425): [WARNING] Stop Bits = 1.5 are not supported
DV_USART.c (429): [WARNING] Stop Bits = 0.5 are not supported
PASSED
TEST 07: USART_Config_Parity PASSED
TEST 08: USART_Config_Baudrate PASSED
TEST 09: USART_Config_CommonParams PASSED
TEST 10: USART_Send PASSED
TEST 11: USART_AsynchronousReceive PASSED
TEST 12: USART_Loopback_CheckBaudrate PASSED
TEST 13: USART_Loopback_Transfer PASSED
TEST 14: USART_CheckInvalidInit PASSED
Test Summary: 14 Tests, 14 Passed, 0 Failed.
Test Result: PASSED
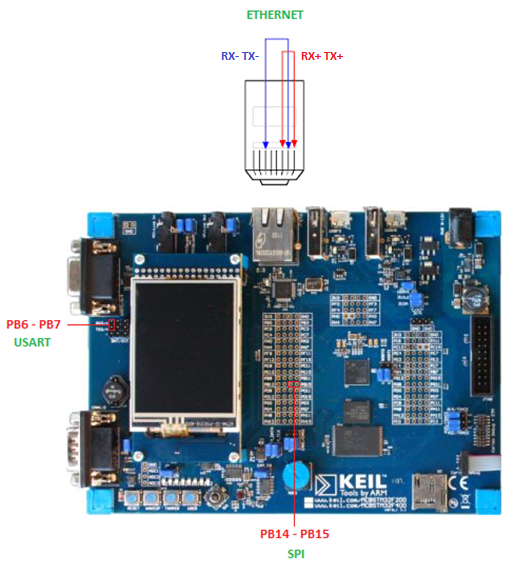
To perform loop back communication tests it is required to connect the input and the output of the peripherals as shown in this table:
| Peripheral | Loop Back Configuration |
|---|---|
| Ethernet | Connect TX+ (Pin 1) with RX+ (Pin 3), TX- (Pin 2) with RX- (Pin 6) |
| SPI | Connect MISO to MOSI |
| USART | Connect TX with RX |
The following picture shows the necessary external loop back connections for the Keil MCBSTM32F400 evaluation board: