 |
Arm-2D
2D Image Processing Library for Cortex-M Processors
|

|
|
Arm-2D
2D Image Processing Library for Cortex-M Processors
|
|


![]()
Arm-2D is an open-source project for 2.5D image processing on Cortex processors. Since its first experimental release on March 30, 2021, and the official v1.1.0 release on December 7, 2022, Arm-2D has experienced a period of rapid and exciting development. Through active community engagement and extensive real-world validation across numerous open-source and commercial projects, the library has evolved into a robust and mature solution.
Today, for IoT endpoint devices, white goods, handheld devices and wearables, Arm-2d provides comprehensive low-level graphics processing capabilities. Especially for resource-constrained, low-power platforms, it is one of the optimal choices for building sophisticated modernised GUI applications, delivering exceptional performance without compromising functionality.
Arm-2D consists of:

Position in Ecosystem:
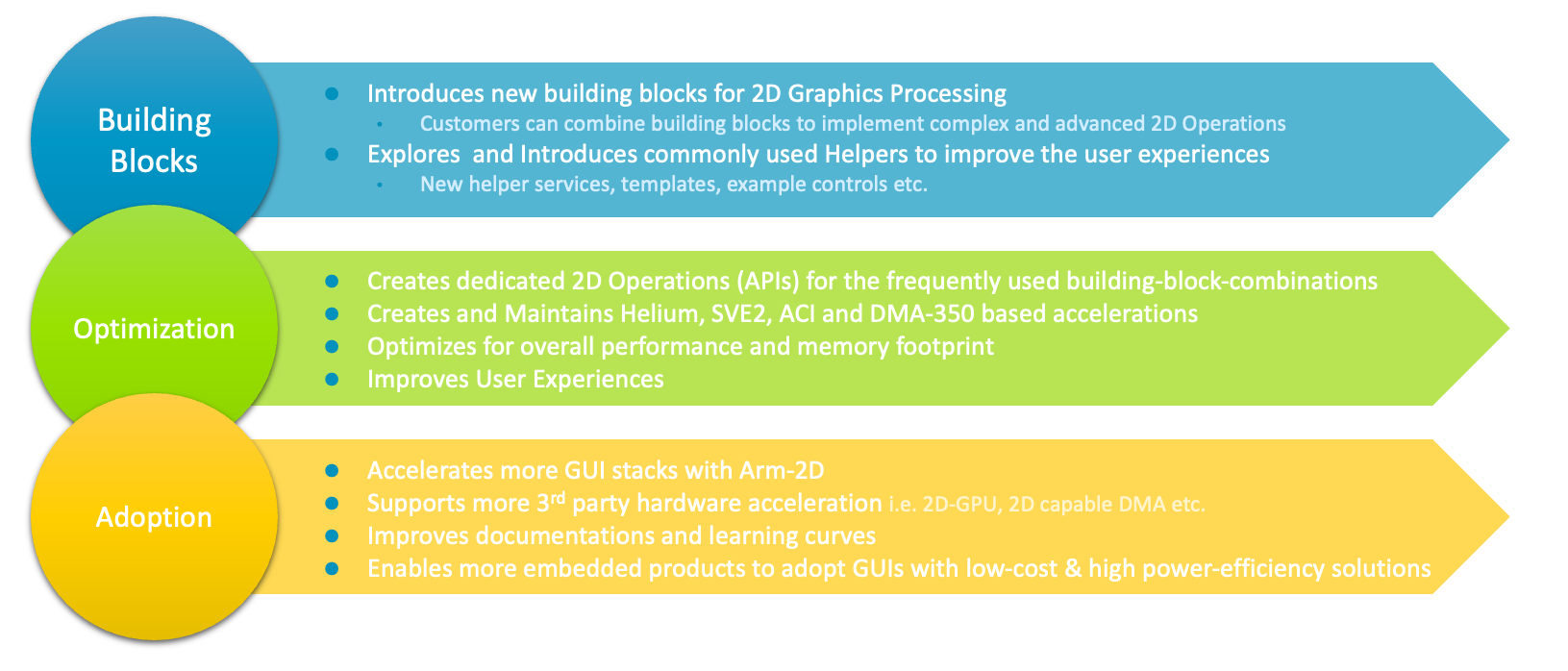
Focus and Objectives:
![]()
Potential users of Arm-2D may have different backgrounds and purposes. Whoever you are, e.g. an application engineer from a silicon vendor who develops drivers, a GUI stack system engineer, or an application developer, based on the purposes , there are two ways to get started with Arm-2D:
We are optimistic that anyone can find something interesting in Arm-2D.
Since Arm-2D provides Low-Level 2D Image Processing Services that are deeply optimised for both performance and memory footprint, it has been quickly adopted in many Deep Embedded Display systems since it debuted in 2020. Now you can find its presence from the tiniest Cortex-M0 to the Raspberry Pi 5 powerhouse. The supported features include, but are not limited to:
Disp0_DrawBitmap[!NOTE]
- As long as the size is smaller than 32767 * 32767.
- As long as the total pixel numebr is smaller than 16M pixels.
Transform (i.e. rotation and scaling)
__ARM_2D_HAS_ANTI_ALIAS_TRANSFORM__ to 1 at compile-time.float) to specify the pivot coordinate.Filters
An Unified and User-Friendly Programmers' Model
Helper Services, Tools and Others
arm_2d_helper_is_time_outarm_2d_helper_time_liner_slider and [new] arm_2d_helper_timer_liner_slider_i64arm_2d_helper_time_cos_sliderarm_2d_helper_time_half_cos_sliderarm_2d_align_centre, arm_2d_align_bottom_right etc.arm_2d_dock_top,arm_2d_dock_right, arm_2d_dock_vertical, __item_line_dock_horizontal etc.__item_line_horizontal and __item_line_vertical__item_horizontal and __item_verticalarm_2d_layout() macro: TOP-DOWN, BOTTOM-UP, RIGHT-TO-LEFT etc.img2c.py for generating arm-2d resources from user-specified imagesttf2c.py for generating user-customized A1, A2, A4 and A8 fonts from an user-specified TrueType FontCMSIS-Pack is available.
With the increasing introduction of smart IoT edge devices into our daily lives, users accustomed to smartphone-like graphical user interfaces (GUIs) now expect a similar modernized experience, even when using microcontroller-based products. This trend has been long recognized and understood by Arm's ecosystem partners.
Consequently, many silicon vendors have integrated dedicated hardware accelerators into their microcontroller products to improve the 2D image processing. At the same time, GUI service providers have updated their product lines to cater to microcontroller-based GUI applications. Many open-source embedded GUI stacks, such as LVGL, are gaining popularity on GitHub.
In reality, using GUIs with microcontrollers is not a new concept. However, with the recent rise of IoT and AI, the limitations of simple and monotonous GUIs have become more apparent and less tolerable. Pursuing a user experience comparable to a smartphone has become a fundamental requirement for many products.
Interestingly, seemingly complex GUIs are often created using simple techniques like 2D image copying and tiling. Even translucent effects are achievable on microcontrollers running at tens or hundreds of MHz.
Technologies for 2D graphics have been mature since the era of 8-bit gaming consoles. If an 8-bit 6502 processor could produce impressive graphics effects, there is no reason why the most advanced Cortex-M processors today cannot achieve even more.
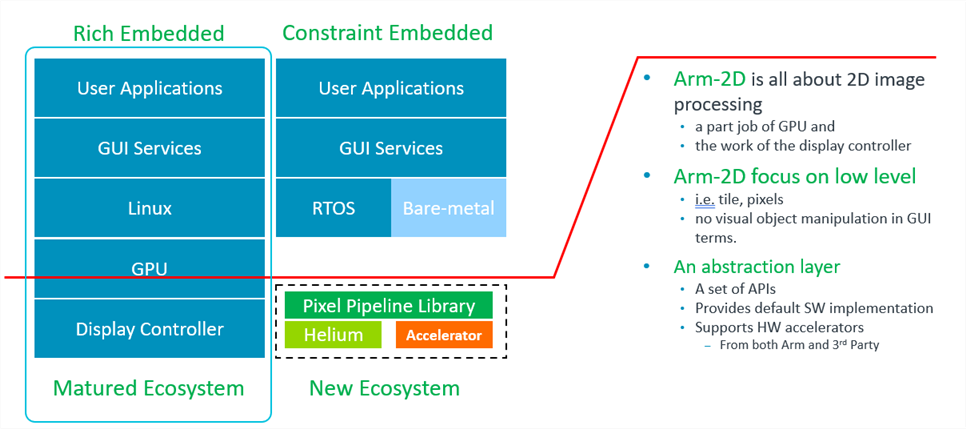
As shown in Figure 1-2, Linux based systems have a complete ecosystem that provides GPU drivers and GUI software services. In contrast, resource-constrained embedded systems do not have such luxury. To enhance the MCU ecosystem, Arm-2D is introduced.
Figure 1-2 Ecosystem Comparison between Rich Embedded and Constraint Embedded System in GUI
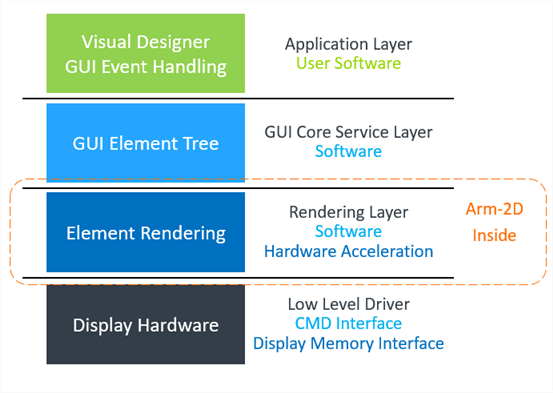
When we look at the traditionally embedded GUI architecture(as shown in Figure 1-3 ), there are four layers: 1) the application and designer layer, 2) the GUI software service layer, 3) the rendering layer, and 3) the hardware driver layer.
Arm-2D focuses on accelerating the low-level 2D image processing, and will not touch upper layers of the GUI software stacks, hence avoiding competing with GUI service providers in the same ecosystem. In fact, because Arm has proposed an abstraction layer for the low-level 2D image processing, a whole ecological level of cooperation can be quickly established between chip manufacturers that provide hardware accelerators and software providers that provide GUI services. Everyone can concentrate on enlarging their own values. For example, by adding arm-2d adaptor drivers for their proprietary 2D accelerators, silicon vendors can achieve a wide range of support from GUI providers who build/port their GUI stack upon Arm-2D APIs.
Figure 1-3 The Hierarchy of a Typical Embedded GUI System.
The library is targeting ALL Cortex-M processors with/without various hardware 2D image accelerators:
The library is designed with ACI (Arm Custom Instructions) in mind. Accelerations implemented with user-defined instructions can be integrated into the library easily as software extensions and it is transparent for upper-layer software.
The library is designed with 2D image accelerators in mind and follows the feature-agnostic principle. The support for 2DGPU (or other Accelerators) can be easily added as software extensions and it is transparent for upper-layer software.
The library is designed with resource constraints in mind. For Cortex-M processors with 8K~32K SRAM that cannot afford a complete framebuffer, Arm-2D introduces a feature called Generic Partial Framebuffer, enabling those existing MCUs to run GUI applications in a decent frame rate.
[!NOTE]
The supports of Arm Compiler 5 is deprecated.
| Projects | Description | Folder | Note |
|---|---|---|---|
| [template][bare-metal][mps2] | It is a bare-metal project for processors running on the MPS2 platforms. | examples/[template][bare-metal][mps2] | |
| [template][bare-metal][an552] | It is a bare-metal project for the Cortex-M55 processor(AN552) running on the MPS3 platforms. | examples/[template][bare-metal][an552] | |
| [template][bare-metal][cortex-m85] | It is a bare-metal project for the Cortex-M85 processor. | examples/[template][bare-metal][cortex-m85] | |
| [template][bare-metal][helium-aci] | It is a bare-metal project to demonstrate the Cortex-M55 (AN552) Helium ACI running on MPS3 platforms. | examples/[template][bare-metal][helium-aci] | |
| [template][bare-metal][STM32F746G-Discovery] | It is a bare-metal project for the STM32F746G-Discovery board. | examples/[template][bare-metal][STM32F746G-Discovery] | Arm Compiler 5, Arm Compiler 6 and GCC |
| [template][cmsis-rtos2] | It is a project template for the RTOS environment, which uses CMSIS-RTOS2 as an example to show how Arm-2D can work with an RTOS. | examples/[template][cmsis-rtos2] | |
| [template][pc][vscode] | It is a project template for PC (i.e. MacOS, Windows and Linux) using VS Code + SDL2 | examples/[template][pc][vscode] | |
| [template][csolution] | It is a csolution project template. | examples/[template][csolution] | |
| [template][pico][oled] | An MDK project template for Raspberry Pi Pico to demonstrate OLED (monochrome) display. | examples/[template][pico][oled] |
There is no public 2D image processing benchmark available for microcontrollers. To facilitate the library development and optimization, we overcome this problem with the following methods:
Figure 1-4 A snapshot of the generic benchmark running in Simulation

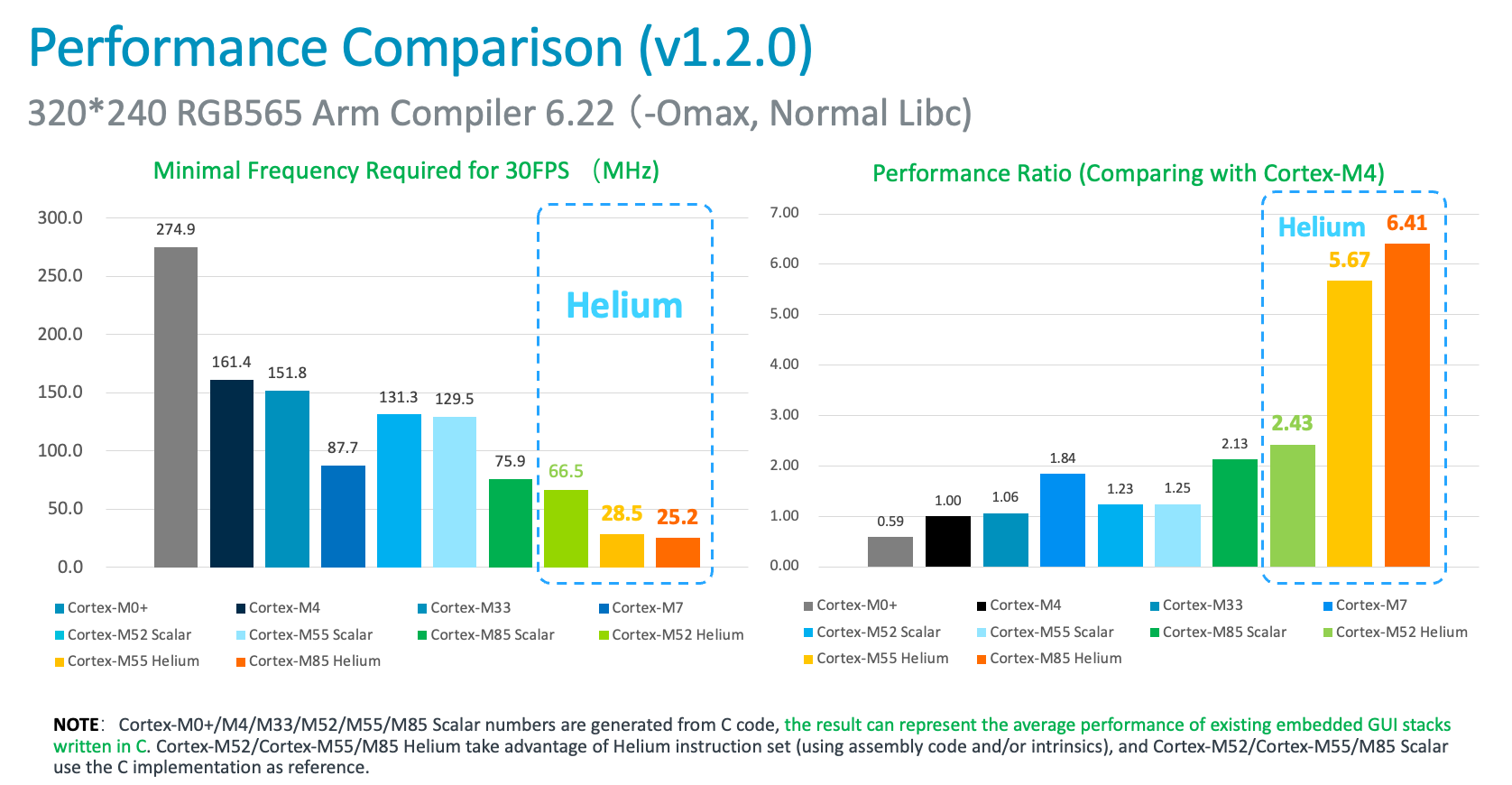
Figure 1-5 Performance Comparison among some Cortex-M processors
| Folder and File | Type | Description |
|---|---|---|
| Library | Folder | This folder contains the library's source files and header files. |
| Helper | Folder | This folder contains the source files and header files of helper functions/services. |
| Acceleration | Folder | This folder contains hardware specific accelerations, e.g. Helium-ACI example in FVP |
| documentation | Folder | This folder contains all the documents. |
| examples | Folder | This folder contains all the examples, controls and templates, etc. |
| README | .md | The README.md you are currently reading. |
| LICENSE | License | The Apache 2.0 License |
| tools | Folder | This folder contains useful utilities for using the library. For example, img2c.py is a Python script that converts specified pictures into the arm2-d tile data structures. |
| Name | Description | Location |
|---|---|---|
| API Manual | An API manual generated by Doxygen | *  : Documentation for latest official release : Documentation for latest official release * Documentation for latest development release |
| README.md | It is the document that you are reading. It provides basic information and guidance for the arm-2d library. | (root) |
| getting_started_as_an_application_designer.md | A guidance for GUI application designers. | documentation |
| getting_started_as_a_gui_stack_developer | A guidance for GUI stack developers. | documentation |
| how_to_deploy_the_arm_2d_library.md | A step by step guide that helps you to deploy the library to your existing or new projects. | documentation |
| introduction.md | A relatively detailed introduction for the library, including basic concepts, programmers' mode etc. | documentation |
| how_to_use_layout_assistant.md | A detailed document introduce the layout assistant helper service. | documentation |
| how_to_use_tile_operations.md | A detailed document elaborates the APIs dedicated to basic tile operations in the arm-2d library. | documentation |
| how_to_accelerate_arm_2d.md | A detailed document elaborates the methods available for accelerating Arm-2D library. | documentation |
| how_to_use_alpha_blending_operations.md | A detailed document elaborates the APIs dedicated to alpha-blending services provided by the arm-2d library. | documentation |
| how_to_use_conversion_operations.md | A detailed document elaborates the APIs dedicated to colour space conversion services provided by the arm-2d library. | documentation |
| how_to_use_drawing_operations.md | A detailed document elaborates the APIs that provide basic point-drawing and colour-filling services in the arm-2d library. | documentation |
| how_to_contribute | A guidance for contribution. | documentation |
Arm-2D aims to bridge the gap between low-cost, resource-constrained devices and high-performance, feature-rich embedded IoT edge devices by providing a unified and user-friendly programming model. Our goal is to facilitate the seamless and easy migration of GUI applications across different platforms. We hope that Arm-2D will inspire more initiatives and engineering practices in this field.
Your thoughts and feedback are important to us. If you can spend some time trying out the library, please feel free to share your insights. It would be helpful to cover the following perspectives:
Thank you for your time.
Arm-2D Development Team.
18 March 2026