|
CMSIS-RTX
Keil RTX5 Real-Time Operating System
|

|
|
CMSIS-RTX
Keil RTX5 Real-Time Operating System
|
|
Many aspects of the kernel are configurable and the configuration options are mentioned where applicable.
RTX5 implements a low-latency preemptive scheduler. Major parts of RTX5 are executed in handler mode such as
SysTick_Handler used for time-based scheduling.SVC_Handler used for lock-based scheduling.PendSV_Handler used for interrupt-based scheduling.In order to be low-latency with respect to ISR execution those system exceptions are configured to use the lowest priority groups available. The priorities are configured such that no preemption happens between them. Thus no interrupt critical sections (i.e. interrupt locks) are needed to protect the scheduler.
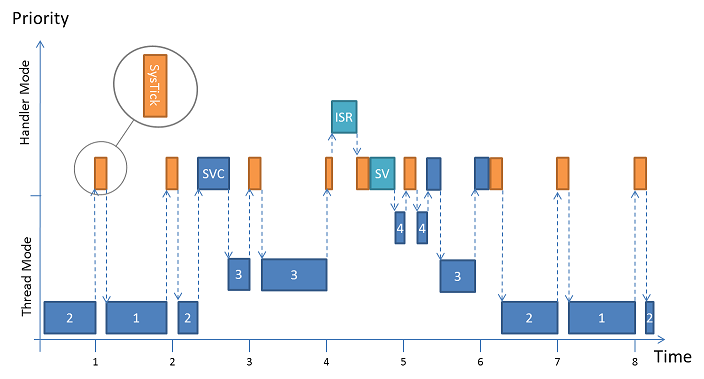
The scheduler combines priority and round-robin based context switches. The example depicted in the image above contains four threads (1, 2, 3, and 4). Threads 1 and 2 share the same priority, thread 3 has a higher one and thread 4 the highest (priority). As long as threads 3 and 4 are blocked the scheduler switches between thread 1 and 2 on a time-slice basis (round-robin). The time-slice for round-robin scheduling can be configured, see Round-Robin Timeout in System Configuration.
Thread 2 unblocks thread 3 by an arbitrary RTOS-call (executed in SVC handler mode) at time index 2. The scheduler switches to thread 3 immediately because thread 3 has the highest priority. Thread 4 is still blocked.
At time index 4 an interrupt (ISR) occurs and preempts the SysTick_Handler. RTX does not add any latency to the interrupt service execution. The ISR routine uses an RTOS-call that unblocks thread 4. Instead of switching to thread 4 immediately the PendSV flag is set to defer the context switching. The PendSV_Handler is executed right after the SysTick_Handler returns and the deferred context switch to thread 4 is carried out. As soon as highest priority thread 4 blocks again by using a blocking RTOS-call execution is switched back to thread 3 immediately during time index 5.
At time index 5 thread 3 uses a blocking RTOS-call as well. Thus the scheduler switches back to thread 2 for time index 6.
At time index 7 the scheduler uses the round-robin mechanism to switch to thread 1 and so on.
The start of the kernel need to be performed
RTX5 objects (thread, mutex, semaphore, timer, message queue, thread and event flags, as well as memory pool) require dedicated RAM memory. Objects can be created using osObjectNew() calls and deleted using osObjectDelete() calls. The related object memory needs to be available during the lifetime of the object.
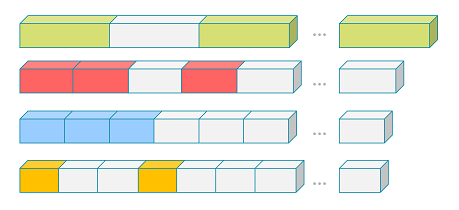
RTX5 offers three different memory allocation methods for objects:
It's possible to intermix all the memory allocation methods in the same application.
The global memory pool allocates all objects from a memory area. This method of memory allocation is the default configuration setting of RTX5.

When the memory pool does not provide sufficient memory, the creation of the object fails and the related osObjectNew() function returns NULL.
Enabled in System Configuration.
Object-specific memory pools avoids memory fragmentation with a dedicated fixed-size memory management for each object type.
This type of memory pools are fully time deterministic, which means that object creation and destruction takes always the same fixed amount of time. As a fixed-size memory pool is specific to an object type, the handling of out-of-memory situations is simplified.
Object-specific memory pools are selectively enabled for each object type, e.g: mutex or thread using the RTX configuration file:
When the memory pool does not provide sufficient memory, the creation of the object fails and the related osObjectNew() function returns NULL.
In contrast to the dynamic memory allocations, the static memory allocation requires compile-time allocation of object memory.
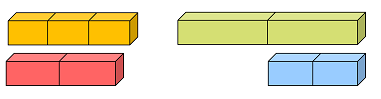
Static memory allocation can be achieved by providing user-defined memory using attributes at object creation, see Manual User-defined Allocation. Please take special note of the following restrictions:
| Memory type | Requirements |
|---|---|
| Control Block (osXxxAttr_t::cb_mem) | 4-Byte alignment. Size defined by osRtxThreadCbSize, osRtxTimerCbSize, osRtxEventFlagsCbSize, osRtxMutexCbSize, osRtxSemaphoreCbSize, osRtxMemoryPoolCbSize, osRtxMessageQueueCbSize. |
| Thread Stack (osThreadAttr_t::stack_mem) | 8-Byte alignment. Size is application specific, i.e. amount of stack variables and frames. |
| Memory Pool (osMemoryPoolAttr_t::mp_mem) | 4-Byte alignment. Size calculated with osRtxMemoryPoolMemSize. |
| Message Queue (osMessageQueueAttr_t::mq_mem) | 4-Byte alignment. Size calculated with osRtxMessageQueueMemSize. |
In order to allow RTX5 aware debugging, i.e. Component Viewer, to recognize control blocks, they need to be placed in individual memory sections by using __attribute__((section(...))).
| RTX Object | Linker Section |
|---|---|
| Thread | .bss.os.thread.cb |
| Timer | .bss.os.timer.cb |
| Event Flags | .bss.os.evflags.cb |
| Mutex | .bss.os.mutex.cb |
| Semaphore | .bss.os.semaphore.cb |
| Memory Pool | .bss.os.mempool.cb |
| Message Queue | .bss.os.msgqueue.cb |
It must be assured that these sections are placed into contiguous memory. This can fail, i.e. sections end up being split over multiple memory segments, when assigning compilation units to memory segments, manually.
The following code example shows how to create an OS object using static memory.
Code Example:
For Cortex-M processors without floating point unit the thread context requires 64 bytes on the local stack.
Note
- For Cortex-M4/M7 with FP the thread context requires 200 bytes on the local stack. For these devices the default stack space should be increased to a minimum of 300 bytes.
Each thread is provided with a separate stack that holds the thread context and stack space for automatic variables and return addresses for function call nesting. The stack sizes of RTX threads are flexibly configurable as explained in the section Thread Configuration. RTX offers a configurable checking for stack overflows and stack utilization.
The system thread osRtxIdleThread can be use to switch the system into a low-power mode. The easiest form to enter a low-power mode is the execution of the __WFE function that puts the processor into a sleep mode where it waits for an event.
Code Example:
Note
__WFE()is not available in every Cortex-M implementation. Check device manuals for availability.
RTX uses the generic OS Tick API to configure and control its periodic Kernel Tick.
To use an alternative timer as the Kernel Tick Timer one simply needs to implement a custom version of the OS Tick API.
Note
- The OS Tick implementation provided must assure that the used timer interrupt uses the same (low) priority group as the service interrupts, i.e. interrupts used by RTX must not preempt each other. Refer to the Scheduler section for more details.
RTX5 provides extension for tick-less operation which is useful for applications that use extensively low-power modes where the SysTick timer is also disabled. To provide a time-tick in such power-saving modes, a wake-up timer is used to derive timer intervals. The CMSIS-RTOS2 functions osKernelSuspend and osKernelResume control the tick-less operation.
Using this functions allows the RTX5 thread scheduler to stop the periodic kernel tick interrupt. When all active threads are suspended, the system enters power-down and calculates how long it can stay in this power-down mode. In the power-down mode the processor and peripherals can be switched off. Only a wake-up timer must remain powered, because this timer is responsible to wake-up the system after the power-down period expires.
The tick-less operation is controlled from the osRtxIdleThread thread. The wake-up timeout value is set before the system enters the power-down mode. The function osKernelSuspend calculates the wake-up timeout measured in RTX Timer Ticks; this value is used to setup the wake-up timer that runs during the power-down mode of the system.
Once the system resumes operation (either by a wake-up time out or other interrupts) the RTX5 thread scheduler is started with the function osKernelResume. The parameter sleep_time specifies the time (in RTX Timer Ticks) that the system was in power-down mode.
Code Example:
Note
__WFE()is not available in every Arm Cortex-M implementation. Check device manuals for availability.
The alternative using __WFI() has other issues, explained in the Arm Knowledge Based Article Low Power RTX Applications on Cortex-M Devices.
Timeout values are an argument to several osXxx functions to allow time for resolving a request. A timeout value of 0 means that the RTOS does not wait and the function returns instantly, even when no resource is available. A timeout value of osWaitForever means that the RTOS waits infinitely until a resource becomes available. Or one forces the thread to resume using osThreadResume which is discouraged.
The timeout value specifies the number of timer ticks until the time delay elapses. The value is an upper bound and depends on the actual time elapsed since the last timer tick.
Examples:

On Cortex-M processors, the RTX5 kernel uses the following interrupt exceptions. The table below also lists the priorities that must be assigned to these interrupts.
| Handler | Priority | Interrupt/Exception |
|---|---|---|
| SysTick | lowest | Kernel system timer interrupt to generate periodic timer ticks |
| PendSV | lowest | PendSV (request for system-level service) when calling certain RTX functions from Handler mode |
| SVC | lowest+1 | Supervisor Call used to enter the RTOS kernel from Thread mode |
Other device interrupts can be used without limitation. For Arm Cortex-M3/M4/M7 /M23/M33/M35P/M55/M85 processors, interrupts are never disabled by RTX Kernel.
Usage of interrupt priority grouping
Code Example
The following CMSIS-RTOS2 functions can be called from threads and Interrupt Service Routines (ISR):
Functions that cannot be called from an ISR are verifying the interrupt status and return the status code osErrorISR, in case they are called from an ISR context. In some implementations, this condition might be caught using the HARD_FAULT vector.
Note
- RTX does not disable interrupts during critical sections for Armv7-M and Armv8-M architecture based devices, but rather uses atomic operations.
- Therefore, there is no need to configure interrupt priorities of interrupt service routines that use RTOS functions.
Supervisor Calls (SVC) are exceptions targeted at software and operating systems for generating system function calls. They are sometimes called software interrupts. For example, instead of allowing user programs to directly access hardware, an operating system may provide access to hardware through an SVC. So when a user program wants to use certain hardware, it generates the exception using SVC instructions. The software exception handler in the operating system executes and provides the requested service to the user application. In this way, access to hardware is under the control of the OS, which can provide a more robust system by preventing the user applications from directly accessing the hardware.
SVCs can also make software more portable because the user application does not need to know the programming details of the underlying hardware. The user program will only need to know the application programming interface (API) function ID and parameters; the actual hardware-level programming is handled by device drivers.
SVCs run in privileged handler mode of the Arm Cortex-M core. SVC functions accept arguments and can return values. The functions are used in the same way as other functions; however, they are executed indirectly through the SVC instruction. When executing SVC instructions, the controller changes to the privileged handler mode.
Interrupts are not disabled in this mode. To protect SVC functions from interrupts, you need to include the disable/enable intrinsic functions __disable_irq() and __enable_irq() in your code.
You can use SVC functions to access protected peripherals, for example, to configure NVIC and interrupts. This is required if you run threads in unprivileged (protected) mode and you need to change interrupts from the within the thread.
To implement SVC functions in your Keil RTX5 project, you need to:
Write a function implementation. Example:
Add the function to the SVC function table in the svc_user.c module:
Increment the number of user SVC functions:
Declare a function wrapper to be called by the user to execute the SVC call. Code Example (Arm Compiler 6):
Note
- The SVC function 0 is reserved for the Keil RTX5 kernel.
- Do not leave gaps when numbering SVC functions. They must occupy a continuous range of numbers starting from 1.
- SVC functions can still be interrupted.
RTX5 provides an interface to the Arm C libraries to ensure static data protection in a multi-threaded application.
The Arm C libraries use static data to store errno, floating-point status word for software floating-point operations, a pointer to the base of the heap, and other variables. The Arm C micro-library (i.e. microlib) does not support protection for multi-threaded applications. See the Differences between microlib and the default C library.
By default, RTX5 uses the Arm C libraries multi-thread protection for:
OS_THREAD_LIBSPACE_NUM if Object specific Memory allocation is disabled. The definition OS_THREAD_LIBSPACE_NUM defines the number of threads that can safely call Arm C library functions and can be found in RTX_Config.h file or can be defined on the global scope.The default, Arm C libraries use mutex functions to protect shared resources from concurrent access. RTX5 implements these functions and uses resources from the Global Dynamic Memory to allocate mutex objects.