|
CMSIS-Driver
Peripheral Interface for Middleware and Application Code
|

|
|
CMSIS-Driver
Peripheral Interface for Middleware and Application Code
|
|
Developers can use CMSIS-Driver Validation framework to verify that an implementation of a peripheral driver is compliant with the corresponding CMSIS-Driver Specification. Verified drivers can then be reliably used with middleware components and user applications that rely on CMSIS-Driver APIs.
The CMSIS-Driver Validation is maintained in a separate public GitHub repository, and is also released as a CMSIS Software Pack named ARM::CMSIS-Driver_Validation.
This page gives an overview about driver validation. Refer to CMSIS-Driver Validation Guide) for full documentation.
The CMSIS-Driver Validation Suite performs the following tests:
The following CMSIS-Drivers can be tested with the current release:
The Driver Validation output can be printed to a console or saved in an XML file, via standard output (usually ITM).
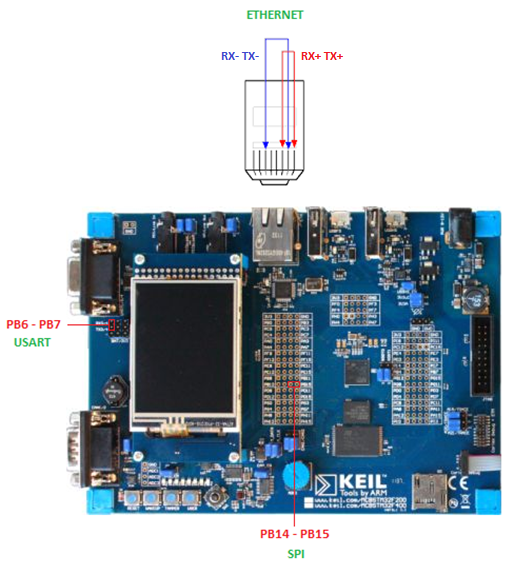
To perform loop back communication tests it is required to connect the input and the output of the peripherals as shown in this table:
| Peripheral | Loop Back Configuration |
|---|---|
| Ethernet | Connect TX+ (Pin 1) with RX+ (Pin 3), TX- (Pin 2) with RX- (Pin 6) |
| SPI | Connect MISO to MOSI |
| USART | Connect TX with RX |
The following picture shows the necessary external loop back connections for the Keil MCBSTM32F400 evaluation board: