 |
OpenGL ES SDK for Android
ARM Developer Center
|
|
OpenGL ES SDK for Android
ARM Developer Center
|
Demonstration of Occlusion Query functionality in OpenGL ES 3.0.
It's assumed that you have read and understood all of the mechanisms described in Asset Loading,Simple Triangle and Texture Cube.
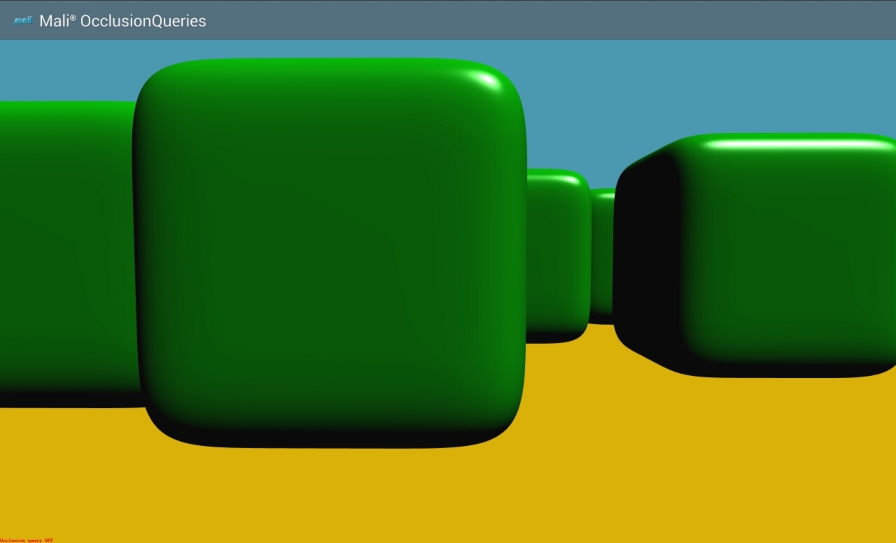
The main purpose of the application is to show the difference in performance when the occlusion query mode is on or off. If the occlusion query mode is on, then only the cubes that are visible to the viewer are rendered. In the other case, when the occlusion query mode is off, then all of the cubes are rendered, which leads to a massive decrease in performance.
We are rendering rounded cubes - the objects are more complicated than the normal cubes, which means the time needed for rendering this kind of objects is longer. We are using this fact to demonstrate the occlusion query mode. When we want to verify whether the object is visible for a viewer, we can draw a simpler object (located in the same position as the requested one and being almost of the same size and shape), and once we get the results, we are able to render only those rounded cubes which passed the test.
There is also text displayed (at the bottom left corner of the screen) showing whether the occlusion query mode is currently on or off. The mode changes every 10 seconds.
In the application we are rendering a plane, cubes and rounded cubes. The "normal" cubes are rendered only in occlusion query mode to verify whether the object is visible for a viewer, but they are not visible on the screen: more detail is provided in the following section Occlusion Queries.
The first step we should take is to generate the coordinates of the objects we would like to render and prepare them for the draw calls. Let's describe the mechanism based on an example of a plane object as all of the objects should be prepared in the same way.
We want to draw a plane which is laid horizontally, which in the 3D space means it should be located in XZ space. Please note that there will also be lighting applied, which means that we will need normals as well.
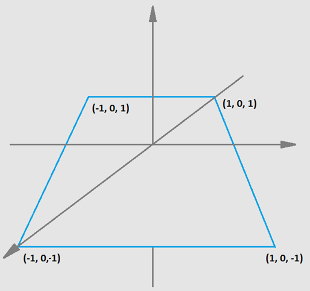
The basic OpenGL ES rendering technique is based on drawing triangles that make up a requested shape. This will be our next step. It's important to mention here that whilst describing plane triangle vertices, you should follow the clockwise or counter-clockwise order, otherwise OpenGL ES will have trouble in detecting the front and back faces. In this example we are using clockwise (CW) order to describe plane coordinates as this is the default for OpenGL ES.
We will need plane normals as well.
Once we have generated the plane coordinates we should focus on the API. We need buffer objects to store the generated data. But we will need Vertex Array objects as well to easily determine which vertex data (stored in buffer objects) should be used for a specific draw command. As written in the OpenGL ES 3.0 documentation: The buffer objects that are to be used by the vertex stage of the GL are collected together to form a vertex array object. To generate Vertex Array object we need to call
As mentioned before, we will need buffer objects to store generated data. To create ones we need to issue
What we need to do now is to copy plane coordinates and plane normals to the specific buffer objects.
To define an array of generic vertex attribute data, we need to call
Please note that these commands should be called for a specific buffer object being currently bound, which means the call hierarchy should look like follows
In the glVertexAttribPointer() calls we use verticesAttributeLocation and normalAttributeLocation as arguments. These values indicate the locations of the attributes within a program object that are used for rendering the specific geometry. We will describe the problem in more details at the end of this section.
The next step is to bind vertex array object
and enable vertex attrib arrays
When we want to render the plane, we need to make sure that the specific vertex array object is currently bound and then issue the draw call.
At this point, the reader should be already aware of how to prepare and use program objects. Let us briefly describe the mechanism.
Once you have called the functions for both fragment and vertex shaders, you should now attach both to a program object,
link the program object,
and set the program object to be used (active).
The verticesAttributeLocation and normalAttributeLocation arguments used in the glVertexAttribPointer() calls are attrib locations which are retrieved with the following call.
The second argument corresponds to the attribute name used in the vertex shader.
Vertex shader code
Fragment shader code
As already mentioned before, the main purpose of the application is to show the difference in the performance when the occlusion query mode is on or off. The occlusion query mechanism is used to verify whether an object is visible for a viewer or if it is occluded by other objects (in this case there is no need to render it as we are not able to see it anyway). If all of the objects which are not visible are ignored, then the application runs much faster in comparison to rendering all of the objects. This is where we are able to use an optimization trick. We want to render rounded cubes on a screen, which is rather a complicated geometry and rendering it takes some time. But we can use a very similar shape, that is much easier to render: the normal cube, only to verify the occlusion. But let us describe the problem in details.
First of all, we need to generate the query objects.
When we want the occlusion query mode to be issued, we are render the normal cubes as well, so we need to set a proper vertex array object to be active.
We don't want the normal cubes to be visible on screen, this is why we are calling
Then we can enable the query test and render each cube (separately).
Then we restore the color mask, so that the next draw call results will be visible on screen.
We would like to draw the rounded cubes now, so the proper vertex array object should be used.
Now, for each cube, we need to verify whether it should be rendered or not. We need to get the query result.
And in case, the GL_TRUE is returned (which means the cube is visible), we can issue the draw call
In the application, we are doing one more thing to make the occlusion test work properly. We are sorting the cubes' positions from the nearest to the furthest (relative to the viewer's position). This should be issued before the occlusion test.
If we now would want to turn off the occlusion query mode, we should just simply render all of the rounded cubes.

