 |
Arm Virtual Hardware
Version 2.2.0
Arm FVP Simulation Models
|

|
|
Arm Virtual Hardware
Version 2.2.0
Arm FVP Simulation Models
|
|
The Arm Fixed Virtual Platforms (Arm FVPs) provide functionally accurate simulation models of Arm-based Cortex-M CPUs and Corstone-3xx subsystems.
The models are standalone programs that can be executed in a target environment. See Available Models for a list of FVPs provided in this context.
Section Using Arm FVPs gives an overview how to run an embedded program on a target Arm FVP model using command line interface. Infrastructure chapter provides details on how to obtain Arm FVPs and use them in various cloud-native or desktop environments workflows, such as GitHub and Keil MDK.
The Arm FVP simulation models build a subset of Arm Fast Models Fixed Virtual Platforms with extensions for Virtual Interfaces Overview.
The table below lists the available models:
| FVP Simulation Model Name | Processor Cores | Overview Description |
|---|---|---|
| FVP_Corstone_SSE-320 | Cortex-M85, Ethos-U85, Mali-C55 | FVP for Arm Corstone SSE-320 Reference Guide |
| FVP_Corstone_SSE-315 | Cortex-M85, Ethos-U65, Mali-C55 | FVP for Arm Corstone SSE-315 Reference Guide |
| FVP_Corstone_SSE-310_Ethos-U65 | Cortex-M85, Ethos-U65 | Arm Corstone SSE-310 FVP |
| FVP_Corstone_SSE-310 | Cortex-M85 Ethos-U55 | Arm Corstone SSE-310 FVP |
| FVP_Corstone_SSE-300_Ethos-U65 | Cortex-M55, Ethos-U65 | Arm Corstone SSE-300 FVP |
| FVP_Corstone_SSE-300_Ethos-U55 | Cortex-M55, Ethos-U55 | Arm Corstone SSE-300 FVP |
| FVP_Corstone_SSE-300 | Cortex-M55 | Arm Corstone SSE-300 FVP |
| FVP_MPS2_Cortex-M85 | Cortex-M85 (2x) | FVP_MPS2_Cortex-M85 in FVP Reference Guide. It is recommended to use Corstone-320/315/310 FVP models for Cortex-M85. |
| FVP_MPS2_Cortex-M55 | Cortex-M55 (2x) | FVP_MPS2_Cortex-M55 in FVP Reference Guide. It is recommended to use Corstone-300 FVP models for Cortex-M55. |
| FVP_MPS2_Cortex-M52 | Cortex-M52 (2x) | FVP_MPS2_Cortex-M52 in FVP Reference Guide |
| FVP_MPS2_Cortex-M35P | Cortex-M35P (2x) | FVP_MPS2_Cortex-M35P in FVP Reference Guide |
| FVP_MPS2_Cortex-M33 | Cortex-M33 (2x) | ARM Cortex-M33 IoT Subsystem for V2M-MPS2+ (AppNote AN505) |
| FVP_MPS2_Cortex-M23 | Cortex-M23 (2x) | ARM Cortex-M23 IoT Subsystem for V2M-MPS2+ (AppNote AN519) |
| FVP_MPS2_Cortex-M7 | Cortex-M7 | ARM Cortex-M7 SMM on V2M-MPS2 (AppNote AN399) |
| FVP_MPS2_Cortex-M4 | Cortex-M4 | ARM Cortex-M4 SMM on V2M-MPS2 (AppNote AN386) |
| FVP_MPS2_Cortex-M3 | Cortex-M3 | ARM Cortex-M3 SMM on V2M-MPS2 (AppNote AN385) |
| FVP_MPS2_Cortex-M0plus | Cortex-M0+ | ARM Cortex-M0+ SMM on V2M-MPS2 (AppNote AN383) |
| FVP_MPS2_Cortex-M0 | Cortex-M0 | ARM Cortex-M0 SMM on V2M-MPS2 (AppNote AN382) |
Note Arm FVPs are only available for Windows and Linux hosts. If you use macOS, a Docker-based approach helps you to run Arm FVPs on your machine. Refer to FVPs-on-Mac to get started.
The Arm Virtual Hardware FVPs implement various virtual interfaces that can be used to stimulate the application under test.
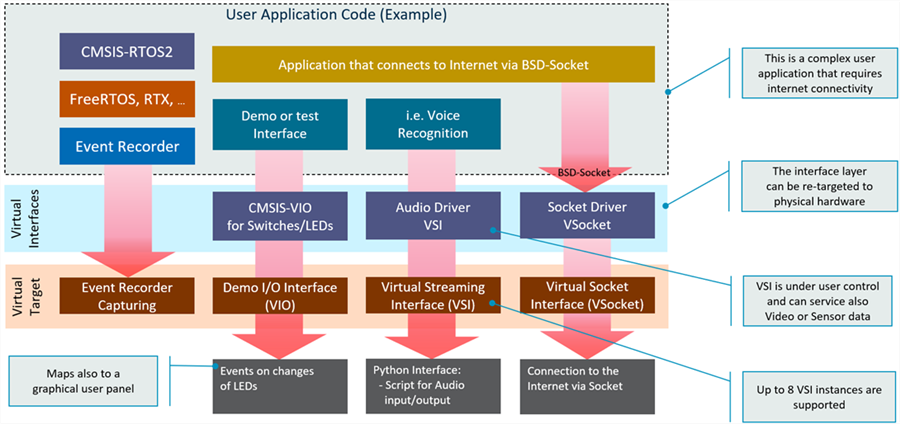
Both VIO and VSI connect to local python scripts and enable flexible scripting for test automation. Eight VSI interfaces are available and may be used in parallel to stream simultaneous multi-channel inputs and outputs. The interfaces are tailored for simulation, but can also map to physical target hardware, for example to a video camera as a VSI input.
In addition the Event Recorder Capturing provides an interface for the Event Recorder API. This software component enables event annotations in the application code or software component libraries. Event Recorder provides visibility to the dynamic execution of an application, enables RTOS awareness, and Event Statistics which helps to optimize the timing of complex algorithms.